ACHIRES – Robust Bipedal Running Based on High-speed Visual Feedback!

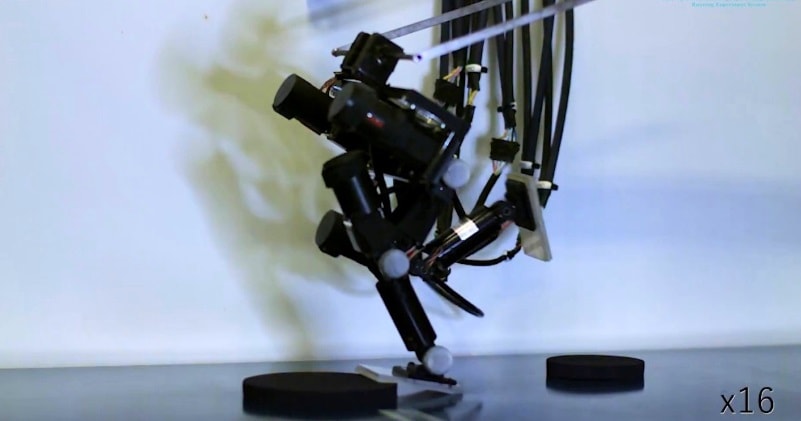
ACHIRES has been improved in the aspect of robustness. The posture stabilization control enables the bipedal robot to keep running on rough terrain and under disturbance force applied to the trunk.
source/image(PrtSc): Ishikawa Senoo Laboratory
The control is based on the instantaneous recognition and behavior for falling avoidance with the integration system composed of high-speed vision and high-speed actuators.
The legs measure 14cm and are set to run at a sagittal plane. While the top speed of 4.2km/h isn’t much, it’s still a lot faster than when many of us try to exercise after an extended vacation.
Advertisement
In this demonstration, robust running can be achieved without any information about incoming obstacles, but only detecting the body posture of the bipedal robot for balance by high-speed vision./Ishikawa Senoo Laboratory
http://bit.ly/2V9UVqH